Pemandu Motor Stepper TB6600HG: Spesifikasi, Ciri dan Aplikasi
Katalog
TB6600HG Keterangan

TB6600HG adalah pemacu motor microstepping sinusoidal tunggal PWM.Ia boleh mencapai kawalan putaran ke hadapan dan terbalik melalui 2 fasa, 1-2-fasa, W1-2-fasa, 2W1-2-fasa, dan mod pengujaan 4W1-2-fasa.2-fasa motor stepper bipolar didorong semata-mata oleh isyarat getaran rendah, isyarat jam kecekapan tinggi.
Alternatif dan setara:
• TB6600FG
• L6258EX
Spesifikasi TB6600HG
• Status bahagian: aktif
• Pembungkusan: Dulang
• Pakej / Kes: HZIP-25
• Pengilang: Toshiba
• Bekalan operasi semasa: 4.2 ma
• Voltan bekalan operasi: 2 V hingga 5.5 V
• Muatkan Voltan Penilaian: 8 V hingga 42 V
• Bilangan output: 2 output
• PD - PENYELESAIAN KUASA: 40 W
• Gaya pemasangan: Melalui lubang
• Panjang pakej/lebar/ketinggian: 29.3mm (max) /4.5mm/15.7mm
• Kategori Produk: Motor / Gerakan / Pengawal & Pemandu Pencucuhan
Keadaan operasi TB6600HG
(TA = -30 ° C hingga 85 ° C)
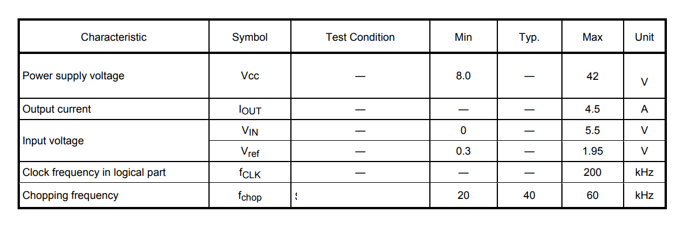
Nota: Dua terminal VCC perlu diprogramkan voltan yang sama.Arus maksimum julat operasi tidak semestinya dijalankan bergantung kepada pelbagai keadaan kerana arus output adalah terhad oleh PD Power Dissipation.Pastikan untuk mengelakkan menggunakan IC dalam keadaan yang akan menyebabkan suhu melebihi TJ (Avg.) = 107 ° C.
Voltan bekalan kuasa 42 V dan arus output 4.5 A adalah nilai maksimum julat operasi.Sila reka bentuk litar dengan cukup derat dalam julat ini dengan mempertimbangkan variasi bekalan kuasa, rintangan luaran, dan ciri -ciri elektrik IC.Sekiranya melebihi voltan bekalan kuasa 42 V dan arus output 4.5 A, IC tidak akan beroperasi secara normal.
Bagaimana cara menyambungkan TB6600HG ke sistem kawalan?
Sambungan Kuasa: Pertama, pastikan anda menyediakan bekalan kuasa yang sesuai kepada TB6600HG.Apabila menggerakkan TB6600HG, anda biasanya perlu menyambungkan dua pin: VCC (bekalan kuasa positif) dan GND (dawai tanah).Pin VCC bertanggungjawab untuk menyediakan voltan yang diperlukan untuk memacu cip, manakala pin GND berfungsi sebagai paras rujukan.Kita perlu memastikan bahawa bekalan kuasa stabil dan memenuhi spesifikasi TB6600HG.
Sambungan isyarat: Mengikut keperluan khusus sistem kawalan, kita perlu menyambungkan isyarat kawalan ke pin yang sepadan dengan cip pemacu TB6600HG.Isyarat kawalan ini biasanya termasuk isyarat kawalan arah dan isyarat nadi langkah, dan lain -lain, yang bertanggungjawab untuk mengarahkan bagaimana tindakan motor, termasuk arah putaran dan kelajuan putaran.
Sambungan Motor: Kita perlu berhati -hati apabila menyambungkan motor ke cip pemandu TB6600HG.Kedua -dua wayar motor, biasanya merah dan hitam, mewakili tiang positif dan negatif motor masing -masing.Kawat merah biasanya menghubungkan ke terminal positif motor, manakala dawai hitam menghubungkan ke terminal negatif.
Sambungan Maklum Balas (Pilihan): Jika pengekod digunakan untuk kawalan maklum balas, kita juga perlu menyambungkan isyarat output pengekod ke sistem kawalan.Ini biasanya termasuk output fasa A, fasa B, dan fasa z (jika tersedia).
Grounding: Kita perlu memastikan bahawa dawai tanah bersama semua peralatan disambungkan dengan betul untuk mengelakkan gangguan dan kerosakan.
Tetapan Inisialisasi: Selepas sambungan selesai, kita perlu memulakan tetapan TB6600HG untuk memastikan ia berfungsi dengan betul.Ini mungkin termasuk menetapkan had semasa, mod melangkah, dll.
Ciri -ciri produk TB6600HG
• Mengadopsi radiator yang diperbesar untuk pelesapan haba yang baik
• Arahan persediaan subdivisi dicetak di belakang papan
• Dengan fungsi perlindungan litar pintas output, penggunaan tanpa bimbang
• Mengadopsi gandingan optik berkelajuan tinggi 6N137 untuk memastikan kelajuan tinggi tanpa kehilangan penyegerakan
• Arus output tidak boleh dilaraskan untuk memenuhi pelbagai keperluan aplikasi anda
• Menggunakan mod input anod biasa, terdapat dua terminal input, menjadikan pendawaian lebih mudah
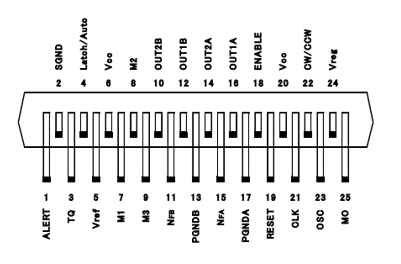
Konfigurasi PIN TB6600HG
Penerangan Fungsi TB6600HG
Tetapan pengujaan
Mod pengujaan boleh dipilih dari lapan mod berikut menggunakan input M1, M2 dan M3.Apabila input M1, M2, atau M3 dialihkan semasa operasi motor, mod pengujaan baru bermula dari mod awal, yang berpotensi mengganggu kesinambungan bentuk gelombang semasa output.
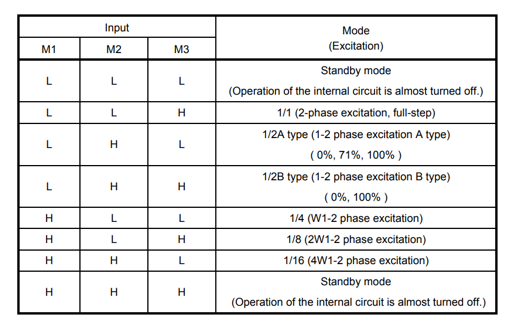
Nota: Untuk menukar mod yang menarik dengan menukar M1, M2, dan M3, pastikan tidak menetapkan M1 = M2 = M3 = L atau M1 = M2 = M3 = H.
Mod siap sedia
Mod operasi bergerak ke mod siap sedia di bawah syarat m1 = m2 = m3 = l atau m1 = m2 = m3 = H. Penggunaan kuasa diminimumkan dengan mematikan semua operasi kecuali melindungi operasi.Dalam mod siap sedia, terminal output MO ialah Hz.Mod siap sedia dikeluarkan dengan mengubah keadaan m1 = m2 = m3 = l dan m1 = m2 = m3 = h ke keadaan lain.Isyarat input tidak diterima untuk kira -kira 200 μs selepas melepaskan mod siap sedia.
Mod kerosakan
Mengecas dan melepaskan arus dalam mod PWM biasanya memerlukan kira -kira lima kitaran dalam OSCM.Mod pereputan cepat 40 peratus dimulakan dengan mendorong kerosakan dalam dua kitaran akhir mod kerosakan cepat, dengan nisbah 40 peratus selebihnya secara konsisten tetap.Hubungan antara kekerapan jam induk (FMCLK), kekerapan OSCM (FOSCM) dan kekerapan PWM (FCHOP) ditunjukkan seperti berikut:
FOSCM = 1/20 × FMCLK
FCHOP = 1/100 × FMCLK
Apabila ROSC = 51kΩ, jam induk = 4MHz, OSCM = 200kHz, kekerapan PWM (FCHOP) = 40kHz.
Mod awal
Apabila menetapkan semula digunakan, arus fasa adalah seperti berikut.
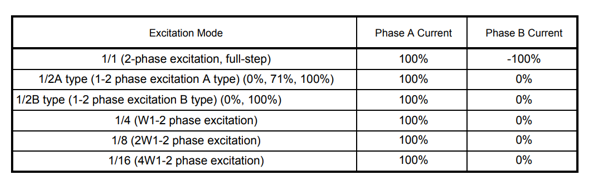
Arah semasa ditakrifkan seperti berikut.
OUT1A → OUT2A: Arah ke hadapan
OUT1B → OUT2B: Arah ke hadapan
Permohonan TB6600HG
Disenaraikan di bawah adalah beberapa aplikasi TB6600HG.
• Lampu ekor
• Bangunan perhotelan
• Paparan LED luar yang besar
• Alternatif untuk menyembunyikan lampu
• Lampu Tinggi Perindustrian
• Backlighting LED Format Besar
• Paparan latar belakang LED
• Telefon pintar yang dibolehkan kamera
• Topologi pemacu step-up atau langkah ke bawah
Kesalahan dan penyelesaian biasa TB6600HG
Berikut ini menyenaraikan beberapa kesalahan biasa mengenai TB6600HG dan penyelesaiannya untuk membantu anda mengambil tindakan cepat apabila menghadapi kesalahan dan melindungi operasi biasa peranti.
Kegagalan satu: Pemakaian cip pemacu terlalu panas
Cip TB6600HG sendiri terlalu panas, mungkin disebabkan oleh beban yang berlebihan atau keadaan pelesapan haba yang lemah.
Penyelesaian: Meningkatkan pelesapan haba
Kami perlu menambah tenggelam haba atau peminat pada cip pemandu dan motor untuk memastikan bahawa mereka dapat menghilangkan haba sepenuhnya semasa bekerja.Pada masa yang sama, kita perlu mengekalkan persekitaran di sekitar cip pemandu dan motor yang berventilasi dengan baik untuk mengelakkan terlalu panas.
Kegagalan Dua: Motor berputar ke arah yang salah
Selepas motor menerima isyarat pemacu, arah putaran tidak selaras dengan yang diharapkan, mungkin isyarat kawalan salah atau cip pemacu tidak dikonfigurasi dengan betul.
Penyelesaian: Periksa isyarat kawalan
Kami perlu memeriksa dengan teliti isyarat kawalan yang dihantar ke TB6600HG untuk memastikan isyarat kawalan arah dan isyarat nadi adalah betul.Jika mikrokontroler digunakan untuk menghantar isyarat, sila semak kod program dan konfigurasi pin.
Kegagalan Tiga: Motor gagal berputar
Motor tidak bertindak balas selepas menerima isyarat pemacu, mungkin cip pemandu tidak berfungsi dengan baik atau ada masalah dengan sambungan antara motor dan cip pemandu.
Penyelesaian: Periksa bekalan kuasa dan sambungan
Kita perlu memastikan bahawa bekalan kuasa TB6600HG adalah normal dan sambungan antara motor dan cip pemandu adalah pepejal.Kami menyemak voltan dan arus dalam litar dengan menggunakan multimeter untuk memastikan ia berada dalam julat normal.
Kegagalan empat: pemanasan motor yang serius
Motor menjana haba yang berlebihan semasa operasi, yang mungkin disebabkan oleh pelesapan haba semasa atau miskin yang berlebihan.
Penyelesaian: Laraskan tetapan semasa
Jika motor menghasilkan haba yang serius, kita boleh cuba mengurangkan arus output cip pemandu.Dengan menyesuaikan pin tetapan semasa TB6600HG, kami dapat mengehadkan saiz arus output dengan berkesan, yang seterusnya mengurangkan beban motor dan memastikan operasi motor yang stabil dan selamat.
Soalan Lazim [Soalan Lazim]
1. Berapakah julat suhu operasi TB6600HG?
Suhu operasi TB6600HG berkisar dari -30 ° C hingga 85 ° C.
2. Apakah TB6600HG?
TB6600HG adalah sejenis pemandu motor stepper, yang direka untuk mengawal motor stepper dalam pelbagai aplikasi seperti mesin CNC, pencetak 3D, robotik, dan sistem automasi.
3. Apakah ciri -ciri utama TB6600HG?
Ciri-ciri TB6600HG termasuk arus motor laras, tetapan resolusi langkah, perlindungan terlalu panas terbina dalam, dan input opto-isolasi untuk kawalan isyarat.