MPU-6050 dalam Tindakan: Panduan Praktikal untuk Persediaan, Konfigurasi, dan Pengurusan Kebisingan
Katalog
Pengenalan kepada MPU-6050
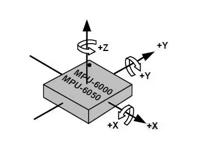
MPU-6050 adalah komponen pemprosesan gerakan 6 paksi bersepadu pertama di dunia, yang mengintegrasikan giroskop 3 paksi, pecutan 3 paksi, dan pemproses gerakan digital berskala (DMP).Tujuan menggunakannya adalah untuk mendapatkan sudut kecenderungan objek yang akan diukur (seperti quadcopter, kereta mengimbangi) pada paksi x, y, dan z, iaitu sudut padang, sudut roll, dan sudut yaw.Kami membaca enam data MPU-6050 (nilai AD percepatan tiga paksi dan nilai iklan halaju sudut tiga paksi) melalui antara muka I2C.Selepas pemprosesan fusion postur, sudut, roll, dan yaw boleh dikira.Sebagai rujukan arah untuk nilai pengukuran, definisi arah koordinat sensor adalah seperti yang ditunjukkan dalam angka di bawah, yang mengikuti prinsip sistem koordinat tangan kanan (iaitu, ibu jari kanan menunjuk ke arah positif x-paksi, jari telunjuk menunjukkan arah positif paksi-y, dan jari tengah menunjuk ke arah positif paksi z).
Dengan bas sensor I2C yang berdedikasi, MPU-6050 dapat menerima input secara langsung dari kompas 3 paksi luaran, menyediakan output MotionFusion ™ 9 paksi penuh.Ia menghapuskan masalah percanggahan antara gycroscope dan garis masa pemecut dan mengurangkan ruang pembungkusan berbanding dengan penyelesaian pelbagai komponen.Apabila disambungkan ke magnetometer tiga paksi, MPU-60X0 mampu menyediakan output gabungan gerakan 9 paksi penuh ke port I2C atau SPI utamanya (perhatikan bahawa port SPI hanya tersedia pada MPU-6000).
Alternatif dan kesamaan
• MPU-3300
• MPU-6000
• MPU-6500
Pengilang MPU-6050
Pengilang MPU-6050 adalah TDK.Selepas dua pengasas TDK, Dr. Yogoro Kato dan Takei Takei, mencipta ferit di Tokyo, mereka mengasaskan Tokyo Denkikagaku Kogyo K.K.Pada tahun 1935. Sebagai jenama industri elektronik global, TDK sentiasa mengekalkan kedudukan dominan dalam bidang bahan mentah elektronik dan komponen elektronik.Portfolio produk yang komprehensif dan inovasi yang didorong oleh TDK meliputi komponen pasif seperti kapasitor seramik, kapasitor elektrolitik aluminium, kapasitor filem, produk magnet, komponen frekuensi tinggi, peranti piezoelektrik dan perlindungan, serta sensor dan sensor (Sensor Magnetik dan MEMS), dan lain -lain. Selain itu, TDK juga menyediakan bekalan kuasa dan peranti tenaga, kepala magnet dan produk lain.Jenama produknya termasuk TDK, EPCOS, Invensense, Micronas, Tronics, dan TDK-Lambda.
Rajah blok dalaman MPU-6050
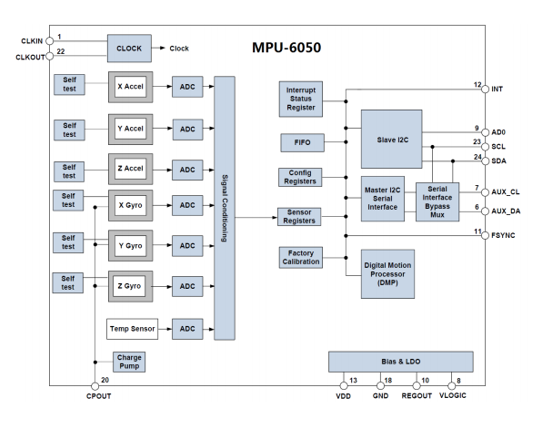
Antaranya, SCL dan SDA adalah antara muka IIC yang disambungkan ke MCU, dan MCU mengawal MPU-6050 melalui antara muka IIC ini.Terdapat juga antara muka IIC, iaitu aux_cl dan aux_da.Antara muka ini boleh digunakan untuk menyambungkan peranti hamba luaran, seperti sensor magnet, untuk membentuk sensor sembilan paksi.Vlogic adalah voltan port IO.PIN ini boleh menyokong sekurang -kurangnya 1.8V.Kami biasanya menyambungkannya terus ke VDD.AD0 adalah pin kawalan alamat antara muka IIC hamba (disambungkan ke MCU).PIN ini mengawal bit terendah alamat IIC.Jika ia disambungkan ke GND, alamat IIC MPU-6050 adalah 0x68;Jika ia disambungkan ke VDD, ia adalah 0x69.Sila ambil perhatian bahawa alamat di sini tidak termasuk sedikit penghantaran data yang paling rendah (bit terendah digunakan untuk mewakili operasi membaca dan menulis).Pada MWBalanCEDSTC15, AD0 disambungkan ke GND, jadi alamat IIC MPU-6050 adalah 0x68 (tidak termasuk bit terendah).
Memulakan antara muka IIC
MPU-6050 menggunakan IIC untuk berkomunikasi dengan STC15, jadi kita perlu memulakan garis data SDA dan SCL yang disambungkan ke MPU-6050 terlebih dahulu.
Reset MPU-6050
Langkah ini mengembalikan semua daftar di dalam MPU-6050 kepada nilai lalai mereka, yang dicapai dengan menulis 1 hingga bit 7 dari Daftar Pengurusan Kuasa 1 (0x6b).Selepas ditetapkan semula, Daftar Pengurusan Kuasa 1 akan dipulihkan kepada nilai lalai (0x40), dan daftar ini kemudiannya akan ditetapkan kepada 0x00 untuk membangunkan MPU-6050 dan memasukkannya ke dalam keadaan kerja biasa.
Tetapkan julat skala penuh sensor halaju sudut (GYRO) dan sensor pecutan
Dalam langkah ini, kami menetapkan julat skala penuh (FSR) dari dua sensor melalui daftar konfigurasi gyroscope (0x1b) dan daftar konfigurasi sensor percepatan (0x1c).Biasanya, kami menetapkan julat giroskop berskala penuh ke ± 2000dps dan julat skala penuh pecutan kepada ± 2g.
Tetapkan parameter lain
Di sini, kita juga perlu mengkonfigurasi parameter berikut: Matikan gangguan, matikan antara muka Aux i2c, melumpuhkan FIFO, menetapkan kadar pensampelan gyroscope, dan mengkonfigurasi penapis rendah digital (DLPF).Oleh kerana kita tidak menggunakan gangguan untuk membaca data dalam bab ini, fungsi gangguan perlu dimatikan.Pada masa yang sama, kerana kita tidak menggunakan antara muka AUX I2C untuk menyambungkan sensor luaran yang lain, kita juga perlu menutup antara muka ini.Fungsi -fungsi ini boleh dikawal melalui daftar Enable Interrupt (0x38) dan daftar kawalan pengguna (0x6a).MPU-6050 boleh menggunakan FIFO untuk menyimpan data sensor, tetapi kami tidak menggunakannya dalam bab ini, jadi semua saluran FIFO perlu ditutup.Ini boleh dikawal melalui daftar Enable FIFO (0x23).Secara lalai, nilai daftar ini adalah 0 (iaitu, FIFO dilumpuhkan), jadi kita boleh menggunakan nilai lalai secara langsung.Kadar pensampelan giroskop dikawal oleh daftar pembahagi kadar pensampelan (0x19).Biasanya, kami menetapkan kadar pensampelan ini kepada 50. Konfigurasi penapis rendah digital (DLPF) disiapkan melalui daftar konfigurasi (0x1a).Secara umumnya, kami akan menetapkan DLPF kepada separuh lebar jalur untuk mengimbangi ketepatan data dan kelajuan tindak balas.
Konfigurasikan sumber jam sistem dan aktifkan sensor halaju sudut dan sensor pecutan
Penetapan sumber jam sistem bergantung kepada Daftar Pengurusan Kuasa 1 (0x6b), di mana tiga bit terendah daftar ini menentukan pemilihan sumber jam.Secara lalai, ketiga -tiga bit ini ditetapkan kepada 0, yang bermaksud sistem menggunakan pengayun RC 8MHz dalaman sebagai sumber jam.Walau bagaimanapun, untuk meningkatkan ketepatan jam, kami sering menetapkannya kepada 1 dan pilih PLL gyroscope paksi X sebagai sumber jam.Di samping itu, membolehkan sensor halaju sudut dan sensor pecutan juga merupakan langkah penting dalam proses permulaan.Kedua -dua operasi dilaksanakan melalui Daftar Pengurusan Kuasa 2 (0x6c).Cukup tetapkan bit yang sepadan hingga 0 untuk mengaktifkan sensor yang sepadan.Selepas melengkapkan langkah-langkah di atas, MPU-6050 boleh memasuki status kerja biasa.Daftar yang tidak ditetapkan secara khusus akan mengadopsi nilai lalai yang dipratetap oleh sistem.
Bagaimana MPU-6050 berfungsi?
Sensor Gyro
Sensor dilengkapi dengan gyro di dalam, yang akan sentiasa selari dengan arah awal kerana kesan gyroscopic.Oleh itu, kita boleh mengira arah dan sudut putaran dengan mengesan sisihan gyro dari arah awal.
Sensor Accelerometer
Sensor pecutan adalah peranti yang dapat mengukur pecutan dan ia berfungsi berdasarkan prinsip kesan piezoelektrik.Semasa pecutan, sensor mengukur daya inersia yang digunakan pada blok massa dan kemudian mengira nilai pecutan menggunakan undang -undang kedua Newton.
Pemproses Gerakan Digital (DMP)
DMP adalah modul pemprosesan data dalam cip MPU6050 yang mempunyai algoritma penapisan Kalman terbina dalam untuk memperoleh data dari sensor giroskop dan pecutan dan memproses quaternions output.Ciri ini sangat mengurangkan beban kerja mikropemproses periferal dan mengelakkan proses penapisan dan data gabungan yang membosankan.
Nota:
Quaternions: Quaternions adalah nombor superkompleks mudah.Nombor kompleks terdiri daripada nombor sebenar ditambah unit khayalan I, di mana i^2 = -1.
Di manakah MPU-6050 digunakan?
• Mainan
• Permainan telefon bimbit dan mudah alih
• Pengawal permainan berasaskan gerakan
• Teknologi Blurfree ™ (untuk penstabilan imej video/masih)
• Teknologi AirSign ™ (untuk keselamatan/pengesahan)
• Pengiktirafan Gesture IG ™ IG ™
• Sensor yang boleh dipakai untuk kesihatan, kecergasan dan sukan
• Rangka kerja permainan dan aplikasi yang dibolehkan
• Teknologi MotionCommand ™ (untuk isyarat pendek isyarat)
• Perkhidmatan berasaskan lokasi, titik minat, dan perhitungan mati
• Kawalan jauh 3D untuk DTV yang berkaitan dengan Internet dan kotak set-top, tikus 3D
• Teknologi TouchAnderwhere ™ (untuk "Tiada Touch" Kawalan/Navigasi Aplikasi UI)
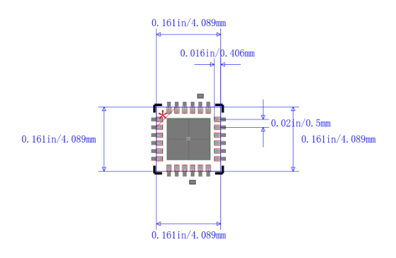
Pakej MPU-6050
Bagaimana untuk mengurangkan bunyi MPU-6050?
Kita boleh mengambil cara berikut untuk mengurangkan bunyi MPU-6050:
Gunakan sensor yang dikalibrasi: Menentukur pecutan dan giroskop MPU-6050 dapat menghapuskan kecenderungan dan kesilapan sensor sendiri, dengan itu mengurangkan kesan bunyi bising.Proses penentukuran biasanya terdiri daripada dua peringkat: penentukuran statik dan penentukuran gerakan.
Proses Penapisan Perkakasan: Menambah kapasitor penapis ke garisan kuasa MPU-6050 dapat mengurangkan kesan bunyi bekalan kuasa pada sensor.Sementara itu, semasa susun atur PCB, kita harus cuba mengekalkan MPU-6050 dari potensi sumber gangguan, seperti garis isyarat frekuensi tinggi dan komponen kuasa tinggi.
Pemprosesan Penapisan Perisian: Selepas mengumpul data mentah dari MPU-6050, kami boleh menambah pautan penapisan perisian untuk memproses data awal untuk menghapuskan gangguan yang disebabkan oleh bunyi.Kaedah penapisan perisian yang biasa digunakan termasuk penapisan min, penapisan median, penapisan Kalman dan sebagainya.
Gunakan penapis lulus rendah dalaman: MPU-6050 mempunyai penapis lulus rendah digital bersepadu dalaman, yang boleh digunakan untuk mengurangkan bunyi frekuensi tinggi dengan menetapkan kekerapan cutoffnya.Khususnya, kita boleh menetapkan kekerapan cutoff penapis digital dengan mengubah suai daftar konfigurasi MPU-6050 untuk menghapuskan bunyi frekuensi tinggi yang disebabkan oleh pensampelan A/D.
Pengiraan trajektori gerakan berasaskan MPU-6050
MPU-6050 adalah pecutan enam paksi dan sensor giroskop yang boleh digunakan untuk mengukur gerakan dan sikap objek.Pengiraan trajektori gerakan berdasarkan MPU-6050 dapat direalisasikan oleh langkah-langkah berikut:
Langkah pertama ialah membaca data sensor.Kita perlu membaca data pecutan dan gyroscope dari sensor MPU-6050 menggunakan pemacu dan fungsi perpustakaan yang sesuai.Data ini biasanya dikeluarkan dalam format digital, jadi beberapa penukaran dan kerja penentukuran diperlukan untuk menukarnya kepada pengukuran sebenar dalam unit fizikal.
Langkah kedua adalah untuk mengira pecutan.Pertama, kita perlu memproses data dari pecutan untuk memperoleh pecutan objek dalam setiap paksi.Seterusnya, untuk mengira halaju dan anjakan objek dalam setiap paksi, kita perlu mengintegrasikan data pecutan.Teknik integrasi berangka, seperti kaedah Euler atau kaedah Lunger-Kutta, sering digunakan dalam proses ini untuk memastikan ketepatan pengiraan anjakan.
Langkah ketiga adalah untuk mengira halaju sudut.Menggunakan data gyroscope, halaju sudut objek dalam setiap paksi boleh dikira.Sekali lagi, data ini perlu ditentukur dan ditukar untuk mendapatkan halaju sudut dalam unit fizikal sebenar.
Langkah keempat adalah untuk mengira putaran.Dengan mengintegrasikan data halaju sudut, sudut putaran objek dalam setiap paksi boleh dikira.Ini boleh dilakukan dengan menggunakan teknik integrasi berangka seperti kaedah Euler atau kaedah Longe-Kutta untuk mengira sudut.
Langkah kelima adalah untuk menggabungkan data.Kami menggabungkan data dari accelerometers dan gyroscopes untuk mendapatkan sikap lengkap dan maklumat kedudukan objek.Ini boleh dilakukan dengan menggunakan algoritma seperti Sikap Sikap Berbasis Quaternion atau Solver Angle Euler.
Langkah keenam adalah untuk memvisualisasikan hasilnya.Kami menukar trajektori gerakan objek yang dikira ke dalam satu set mata dalam sistem koordinat 3D dan memaparkannya menggunakan alat visualisasi yang sesuai untuk pemahaman yang lebih intuitif mengenai perubahan trajektori gerakan dan sikap objek.
Soalan Lazim [Soalan Lazim]
1. Seberapa tepatnya MPU6050?
Hasil yang diperolehi menunjukkan ketepatan yang mencukupi kurang daripada 1 % dan kebolehpercayaan, memastikan dimensi yang betul dari aci lif dan piawaian tinggi industri angkat.
2. Bagaimana membaca data dari MPU6050?
Untuk membaca daftar MPU6050 dalaman, tuan menghantar syarat permulaan, diikuti dengan alamat hamba i2c dan sedikit tulis, dan kemudian alamat daftar yang akan dibaca.
3. Di manakah MPU6050 digunakan?
Dalam pengesanan kesihatan yang boleh dipakai, peranti penjejakan kecergasan.Dalam pesawat dan quadcopters, MPU6050 digunakan untuk kawalan kedudukan.Digunakan dalam mengawal lengan robot.Peranti kawalan isyarat tangan.
4. Adakah MPU6050 IMU?
Blok sensor IMU MPU6050 membaca data dari sensor MPU-6050 yang disambungkan ke perkakasan.Blok output pecutan, kadar sudut, dan suhu di sepanjang paksi sensor.
5. Apakah pemprosesan MPU6050?
Ini adalah pemproses onboard MPU6050 yang menggabungkan data yang datang dari pecutan dan giroskop.DMP adalah kunci untuk menggunakan MPU6050 dan dijelaskan secara terperinci kemudian.Seperti semua mikropemproses DMP memerlukan firmware untuk dijalankan.
Tentang kita
ALLELCO LIMITED
Baca lebih lanjut
Siasatan Pantas.
Sila hantar pertanyaan, kami akan bertindak balas dengan segera.

Panduan mendalam ke LM317: Memahami pengawal selia voltan laras
pada 2024/09/3
Memahami TL431: Panduan Komprehensif untuk Pengawal Pengawal Ketepatan
pada 2024/09/3
Jawatan popular
-
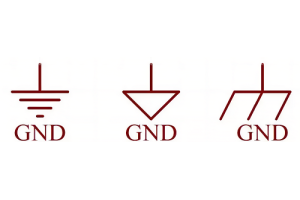
Apakah GND dalam litar?
pada 1970/01/1 3108
-

Panduan Penyambung RJ-45: Kod Warna Penyambung RJ-45, Skim Pendawaian, Aplikasi R-J45, RJ-45 Datasheets
pada 1970/01/1 2672
-
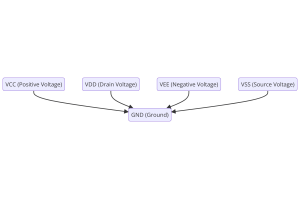
Memahami Voltan Bekalan Kuasa dalam Elektronik VCC, VDD, VEE, VSS, dan GND
pada 0400/11/15 2211
-

Jenis Penyambung Serat: SC vs LC dan LC vs MTP
pada 1970/01/1 2182
-

Perbandingan antara DB9 dan Rs232
pada 1970/01/1 1802
-

Apakah bateri LR44?
Elektrik, kekuatan di mana-mana, secara senyap-senyap meresap setiap aspek kehidupan seharian kita, dari alat remeh ke peralatan perubatan yang mengancam nyawa, ia memainkan peranan senyap.Walau bagaimanapun, benar -benar menggenggam tenaga ini, terutamanya bagaimana untuk menyimpan dan mengeluarkannya dengan cekap, bukan tugas yang mudah.Ia bertentangan dengan latar belakang ini bahawa artikel in...pada 1970/01/1 1774
-
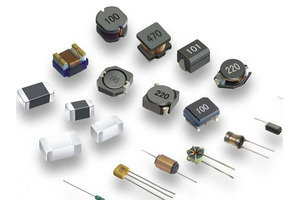
Memahami asas -asas: rintangan induktansi, dancapacitance
Dalam tarian kejuruteraan elektrik yang rumit, trio unsur -unsur asas mengambil peringkat tengah: induktansi, rintangan, dan kapasitans.Setiap menanggung ciri -ciri unik yang menentukan irama dinamik litar elektronik.Di sini, kami memulakan perjalanan untuk menguraikan kerumitan komponen -komponen ini, untuk mendedahkan peranan dan kegunaan praktikal mereka dalam orkestra elektrik yang luas.Indukt...pada 1970/01/1 1728
-

Panduan Komprehensif Bateri CR2430: Spesifikasi, Aplikasi dan Perbandingan dengan Bateri CR2032
Apakah bateri CR2430?Faedah bateri CR2430NormaAplikasi bateri CR2430CR2430 setaraCR2430 VS CR2032Bateri CR2430 SaizApa yang perlu dicari semasa membeli CR2430 dan setaraLembaran data PDFSoalan yang sering ditanya Bateri adalah jantung peranti elektronik kecil.Di antara banyak jenis yang ada, sel -sel duit syiling memainkan peranan penting, yang biasa dijumpai dalam kalkulator, kawalan jauh, dan ja...pada 1970/01/1 1673
-
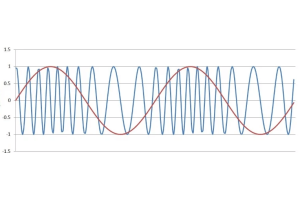
Apa itu RF dan mengapa kita menggunakannya?
Teknologi frekuensi radio (RF) merupakan bahagian utama komunikasi tanpa wayar moden, yang membolehkan penghantaran data dalam jarak jauh tanpa sambungan fizikal.Artikel ini menyelidiki asas -asas RF, menjelaskan bagaimana radiasi elektromagnet (EMR) menjadikan komunikasi RF mungkin.Kami akan meneroka prinsip-prinsip EMR, penciptaan dan kawalan isyarat RF, dan kegunaan luas mereka.Artikel ini juga...pada 1970/01/1 1670
-
Panduan Komprehensif untuk HFE di Transistor
Transistor adalah komponen penting dalam peranti elektronik moden, membolehkan penguatan dan kawalan isyarat.Artikel ini menyelidiki pengetahuan yang mengelilingi HFE, termasuk cara memilih nilai HFE transistor, bagaimana mencari HFE, dan keuntungan dari pelbagai jenis transistor.Melalui penerokaan HFE kami, kami mendapat pemahaman yang lebih mendalam tentang bagaimana transistor berfungsi dan per...pada 5600/11/15 1632
Nombor bahagian panas
-

CS82C55A-5
Renesas Electronics America Inc
IC XPNDR PARALLEL 44PLCC
5SGXEA4K2F40C2LG
Intel
IC FPGA 696 I/O 1517FBGA
0459.250UR
Littelfuse Inc.
FUSE BOARD MNT 250MA 125VAC/VDC
CL02B331KP2NNNC
Samsung Electro-Mechanics
CAP CER 330PF 10V X7R 01005
FAN1654MTFX
Fairchild Semiconductor
IC REG LINEAR
PD69208T4ILQ-TR-LE
Microchip Technology
PD69208T4 IC 8P PSE POE MNGR
LQH43MN470J03L
Murata Electronics
FIXED IND 47UH 220MA 1.5 OHM SMD
LTC6652BHMS8-2.048#PBF
Analog Devices Inc.
IC VREF SERIES 0.1% 8MSOP
06035A100FA12A
KYOCERA AVX
CAP CER 10PF 50V C0G/NP0 0603
SN74ALS1035DR
Texas Instruments
IC BUF NON-INVERT 5.5V 14SOIC
CGA5F2X8R1E474K085AA
TDK Corporation
CAP CER 0.47UF 25V X8R 1206
GRM1555C1H331JA01D
Murata Electronics
CAP CER 330PF 50V C0G/NP0 0402
LMR34206FSC3RNXRQ1
Texas Instruments
POWER MANAGEMENT
08055A7R2BAT2A
AVX Corporation
CAP CER 7.2PF 50V NP0 0805
STR2P3LLH6
STMicroelectronics
MOSFET P-CH 30V 2A SOT-23
XC6SLX45-2FGG676C
AMD
IC FPGA 358 I/O 676FBGA
SI5317C-C-GMR
Skyworks Solutions Inc.
IC JITTER CLEANER 36QFN
PC48F4400P0VB0EA
Micron Technology Inc.
IC FLASH 512MBIT PAR 64EASYBGA -

LTC2051HVHS8#TRPBF
Analog Devices Inc.
IC OPAMP ZERO-DRIFT 2 CIRC 8SO
M24308/3-1Z
Positronic
CONN DSUB PLUG 9P PNL MT SLD CUP
MCP4706A0T-E/CH
Microchip Technology
IC DAC 8BIT V-OUT SOT23-6
MP2229GQ-Z
Monolithic Power Systems Inc.
IC REG BUCK ADJUSTABLE 6A 14QFN
1206CA101KAT9A
KYOCERA AVX
CAP CER 100PF 630V C0G/NP0 1206
LT8210IFE#PBF
Analog Devices Inc.
100V BUCK/BOOST CTLR WITH PASS-T
LM4040A50IDCKR
Texas Instruments
IC VREF SHUNT 0.1% SC70-5
ATTINY87-A15SZ
Atmel
IC MCU 8BIT 8KB FLASH 20SOIC
CL03C6R2BA3GNNC
Samsung Electro-Mechanics
CAP CER 6.2PF 25V C0G/NP0 0201
REF3130AIDBZR
Texas Instruments
IC VREF SERIES 0.2% SOT23-3
NRS5014T2R2NMGG
Taiyo Yuden
FIXED IND 2.2UH 2A 78 MOHM SMD
VI-J51-CX
Vicor Corporation
DC DC CONVERTER 12V 75W
LE45CD-TR
STMicroelectronics
IC REG LINEAR 4.5V 100MA 8SO
1825GA122MAT1A
KYOCERA AVX
CAP CER SMD
NCP81103MNTXG
onsemi
IC REG BUCK CTLR 36QFN
2225SC223MAT1A\SB
KYOCERA AVX
CAP CER 0.022UF 1.5KV X7R 2225
LM2574HVM-3.3
Texas Instruments
IC REG BUCK 3.3V 500MA 14SOIC
MC33972TEW
NXP USA Inc.
IC INTERFACE SPECIALIZED 32SOIC -

RF3374TR7
RFMD
IC RF AMP GP 0HZ-6GHZ SOT89-3
GRM2196T2A8R9DD01D
Murata Electronics
CAP CER 8.9PF 100V T2H 0805
LT6654BIS6-4.096#TRPBF
Analog Devices Inc.
IC VREF SERIES 0.1% TSOT23-6
74LVC74APW,118
NXP Semiconductors
NEXPERIA 74LVC74APW - D FLIP-FLO
0805CS-182EJFS
Delta Electronics/Components
FIXED IND 1.8UH 350MA 900MOHM SM
NAU8223YG
Nuvoton Technology Corporation
IC AMP CLASS D STEREO 3.1W 20QFN
GRM0225C1E7R5BDAEL
Murata Electronics
CAP CER 7.5PF 25V C0G/NP0 01005
MC10XS4200FK
Freescale Semiconductor
HIGH-SIDE SWITCH, 24V, DUAL 10MO
MT18JDF1G72PDZ-1G9P1
Micron Technology Inc.
MODULE DDR3 SDRAM 8GB 240RDIMM
XC7A200T-2FBG484I
AMD
IC FPGA 285 I/O 484FCBGA
TPSB225K035R2000
KYOCERA AVX
CAP TANT 2.2UF 10% 35V 1411
ESM6045DV
STMicroelectronics
TRANS NPN DARL 450V 84A ISOTOP
LT6375HMS#PBF
Analog Devices Inc.
IC OPAMP DIFF 1 CIRCUIT 16MSOP
593D107X9010C2TE3
Vishay Sprague
CAP TANT 100UF 10% 10V 2312
NGTB45N60S1WG
onsemi
IGBT 45A 600V TO-247
NCV551SN31T1G
onsemi
IC REG LINEAR 3.1V 150MA 5TSOP
TCAN1046VDMTRQ1
Texas Instruments
IC TRANSCEIVER 2/2 14VSON
TLV73325PDBVT
Texas Instruments
IC REG LINEAR 2.5V 300MA SOT23-5