Pemandu Motor L298N: Ciri -ciri, Rajah Litar dan Aplikasi
Katalog
Pengenalan kepada L298N
L298N adalah versi pakej menegak L298.Ia adalah cip pemandu motor jambatan penuh dua saluran yang boleh menerima voltan tinggi dan arus tinggi.Voltan kerja boleh mencapai 46V, dan arus output maksimumnya ialah 4A.Di samping itu, L298N juga mempunyai dua terminal kawalan.Terminal kawalan ini membolehkan mod kerja litar diselaraskan secara dinamik dengan memasang dan mencabut pelompat onboard tanpa diganggu oleh isyarat input.L298N dilengkapi dengan input kuasa logik, yang membolehkan bahagian litar logik dalaman beroperasi pada voltan rendah.Pada masa yang sama, ia juga boleh mengeluarkan voltan logik 5V secara luaran.Untuk mengelakkan kerosakan pada cip penstabilan voltan, apabila menggunakan voltan memandu lebih tinggi daripada 12V, sangat disyorkan untuk menggunakan antara muka 5V luaran untuk bekalan kuasa bebas.
L298N mengawal terminal input I/O pada cip kawalan utama dan menyesuaikan voltan output secara langsung melalui bekalan kuasa untuk merealisasikan ke hadapan, terbalik dan berhenti motor.Biasanya, L298N boleh memandu secara langsung relay (empat arah), solenoid, injap solenoid, dua motor DC dan satu motor stepper (dua fasa atau empat fasa).
Alternatif dan setara:
• E-L298N
• L298HN
• LM18298T
Ciri -ciri Fungsian L298N
Keserasian input logik: Input logik L298N serasi dengan TTL, CMOS dan tahap logik lain.
Perlindungan terlalu panas: L298N mempunyai fungsi perlindungan terlalu panas.Apabila suhu cip terlalu tinggi, ia secara automatik akan melepaskan output secara automatik.
Diode Polariti Percuma Terbina: L298N mempunyai diod polaritas percuma terbina dalam, yang boleh digunakan untuk brek motor DC.
Output semasa yang besar: L298N boleh menyediakan arus output yang besar dan sesuai untuk beberapa aplikasi yang memerlukan arus memandu yang besar.
Struktur Jambatan Double H: L298N mengintegrasikan struktur jambatan dua, yang dapat mengawal stereng dan kelajuan dua motor DC atau motor stepper.
L298N Rajah litar
Gambar rajah litar L298N adalah seperti berikut:
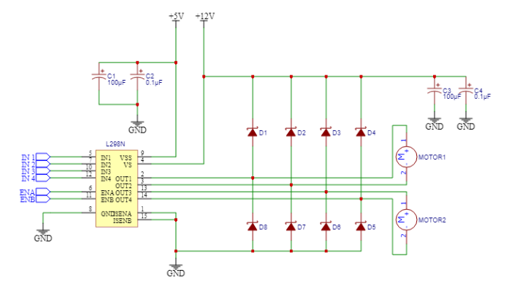
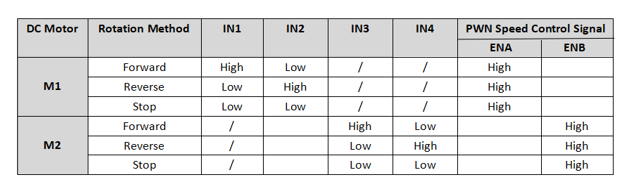
OUT1, OUT2 dan OUT3, OUT4 disambungkan ke Motor1, Motor2;IN1, IN2, IN3, IN4 PIN dari mikrokontroler untuk mengakses tahap kawalan, untuk mengawal motor ke hadapan dan terbalik;ENA, ENB disambungkan ke kawalan terminal membolehkan, untuk mengawal kelajuan motor.Rajah hubungan logik kawalan L298N adalah seperti berikut:
Mengenai peraturan kelajuan motor, kami telah menggunakan kaedah peraturan kelajuan PWM.Prinsip ini terletak pada merealisasikan peraturan kelajuan dengan mengawal masa pengaliran t tiub pensuisan dalam satu kitaran.Voltan purata u di seluruh motor semasa kitaran lengkap t boleh dinyatakan sebagai U = VCC × (T/T) = A × VCC.Di mana, A = T/T, dikenali sebagai kitaran tugas dan VCC mewakili voltan bekalan.Kelajuan motor adalah berkadar dengan voltan di seluruh motor, manakala voltan merentasi motor adalah berkadar dengan kitaran tugas bentuk gelombang kawalan.Oleh itu, terdapat hubungan berkadar antara kelajuan motor dan kitaran tugas: semakin tinggi kitaran tugas, semakin cepat kelajuan motor.
Kaedah Kawalan L298N
Apabila menggunakan L298N, kita perlu memasukkan isyarat kawalan ke IN1, IN2, IN3 dan IN4 untuk mengawal putaran ke hadapan dan terbalik dan kelajuan motor.Berikut adalah beberapa kaedah kawalan:
Mod Kawalan PWM
Mod PWM secara berkesan dapat mengawal kelajuan motor.Apabila menggunakan mod PWM, kita perlu menggunakan dua pin EN1 dan EN2 untuk menyesuaikan kelajuan motor.Khususnya, apabila pin EN1 dan EN2 berada pada tahap tinggi, motor akan beroperasi secara normal;Apabila mereka berada di tahap yang rendah, motor akan berhenti berputar.
Mod kawalan sehala
Apabila IN1, In2, In3 dan In4 adalah tahap yang tinggi pada masa yang sama, motor berputar ke hadapan;Apabila mana -mana dua port input adalah paras yang tinggi dan dua port input yang lain adalah paras yang rendah, motor berputar secara terbalik.
Mod kawalan dua arah
Apabila menggunakan mod kawalan dua hala, IN1 dan IN2 bertanggungjawab untuk mengawal motor 1, manakala IN3 dan IN4 bertanggungjawab untuk mengawal motor 2. Khususnya, apabila IN1 adalah tahap tinggi dan IN2 adalah tahap yang rendah, motor 1 akan berputar ke hadapan;Sebaliknya, apabila IN1 adalah tahap yang rendah dan IN2 adalah tahap yang tinggi, motor 1 akan berputar secara terbalik.Dengan cara yang sama, logik kawalan IN3 dan IN4 juga boleh digunakan untuk kawalan putaran ke hadapan dan terbalik motor 2.
Rajah pin dan fungsi L298N
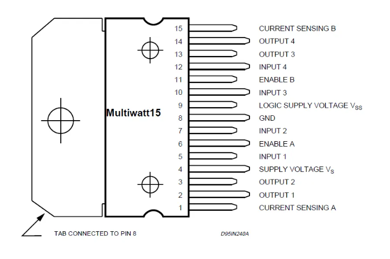
Pin kuasa
Vs: input voltan bekalan (sehingga 46V)
GND: pin tanah
Pin kawalan logik
In1, in2: digunakan untuk mengawal arah putaran motor 1
In3, in4: digunakan untuk mengawal arah putaran motor 2
Pin Kawalan Motor:
OUT1, OUT2: Digunakan untuk mengawal arah motor 1
OUT3, OUT4: Digunakan untuk mengawal arah motor 2
Ena: Dayakan pin, digunakan untuk mengawal kelajuan motor 1
ENB: Dayakan pin, digunakan untuk mengawal kelajuan motor 2
Bagaimana cara menggunakan L298N?
Sambungkan bekalan kuasa: Bekalan kuasa modul pemacu L298N harus disimpan dalam julat 12V hingga 35V.Dalam aplikasi praktikal, untuk memastikan kestabilan bekalan kuasa, kita juga mungkin perlu menapis bekalan kuasa.
Sambungkan motor: Kami menyambungkan kedua -dua motor ke pin output L298N melalui pemandu, dan tahap kawalan secara langsung masuk ke motor melalui L298N.
Kawalan L298N: Kami menggunakan port kawalan (membolehkan, pin kawalan) untuk mengawal L298N.Kita perlu menetapkan status pelabuhan dan pin kawalan membolehkan nilai.Status ini akan menentukan status tahap output L298N.Dengan menukar negeri -negeri ini, kita dapat mengawal putaran dan kelajuan motor yang ke hadapan dan terbalik dengan berkesan.
Bagaimana menggunakan PWM untuk mengawal kelajuan motor?
Jika kita mahu menggunakan PWM untuk mengawal kelajuan motor, kita mempunyai dua kaedah pendawaian:
Kaedah pendawaian satu (disyorkan):
Kami mengeluarkan topi pelompat di antara saluran membolehkan dan 5V, sambungkan pin enable ke pin PWM Arduino, dan sambungkan pin 1 dan 2 ke dua pin normal Arduino.Dengan cara ini, kita dapat mengawal suis saluran melalui pin PWM untuk menyesuaikan kelajuan motor;Dengan mengawal status tahap pin 1 dan 2, kita dapat mengawal arah putaran motor.Cara pendawaian ini hanya memerlukan penggunaan satu pin PWM setiap saluran, tetapi mengambil dua pin biasa.Oleh itu, dalam aplikasi praktikal, kita perlu menimbang dan memilih antara kaedah pendawaian berganda berdasarkan bilangan pin yang terdapat di Arduino.
Kaedah pendawaian dua (tidak disyorkan):
Kami tidak mengeluarkan pelompat antara saluran membolehkan dan 5V, jadi saluran akan terus terbuka.Kemudian, kami menghubungkan pin 1 dan 2 ke dua antara muka PWM Arduino masing -masing.Dengan mengawal output yang sepadan dengan kedua -dua pin ini, kita dapat mengawal arah dan kelajuan putaran motor.Jelas sekali, kaedah pendawaian ini akan menduduki lebih banyak pin PWM, kerana setiap saluran memerlukan dua pin PWM untuk dikawal.Walau bagaimanapun, kaedah ini tidak menduduki mana -mana pin biasa.Oleh itu, kami tidak mengesyorkan menggunakan skim pendawaian ini apabila sumber pin PWM ketat.
Di mana L298N digunakan?
Kenderaan Elektrik: L298N boleh digunakan untuk mengawal motor pemacu dalam kenderaan elektrik, seperti basikal elektrik, skuter, dan lain -lain.Memandu stabil basikal elektrik.Penunggang boleh menghantar arahan kepada L298N dengan mengendalikan pemegang atau butang, dengan itu mengawal output motor untuk membuat pemacu basikal mengikut hasrat penunggang.
Peralatan Perindustrian Automatik: Dalam bidang automasi perindustrian, L298N boleh digunakan untuk mengawal motor pelbagai peralatan perindustrian, seperti tali pinggang penghantar, lengan robotik, robot perindustrian, dan lain -lain.Sudut putaran dan kelajuan motor, yang membolehkan lengan robot bergerak mengikut trajektori yang telah ditetapkan dan mencapai operasi ketepatan tinggi.Ini bukan sahaja meningkatkan kecekapan pengeluaran, tetapi juga mengurangkan kerugian pengeluaran yang disebabkan oleh kesilapan operasi.
Teknologi Robot: L298N sering digunakan dalam projek robot untuk mengawal motor pemacu untuk merealisasikan pergerakan dan tindakan robot.Robot perindustrian sering perlu menjalankan kerja berat, kerja ketepatan tinggi, dan mempunyai keperluan yang sangat tinggi pada motor pemacu.L298N menyediakan sokongan kuasa yang kuat untuk robot perindustrian dengan keupayaan memandu dan kestabilan yang sangat baik.Sama ada pengendalian, perhimpunan atau pemeriksaan, L298N dapat memastikan bahawa robot perindustrian menyelesaikan tugas dengan tepat dan cekap.
Rumah Pintar: Dalam sistem rumah pintar, L298N boleh digunakan untuk mengawal motor tirai, langsir, pintu dan peralatan lain untuk mencapai kawalan automatik.Dengan menggabungkan dengan sensor, peralatan rumah boleh diselaraskan secara automatik mengikut pencahayaan, suhu dan keadaan lain.
Sistem Penjejakan Suria: Dalam sistem solar, L298N boleh digunakan untuk mengawal sudut kecondongan panel solar untuk melaksanakan sistem penjejakan solar.Melalui kawalan L298N, sistem penjejakan solar dapat merasakan perubahan kedudukan matahari dalam masa nyata dan menyesuaikan sudut kecondongan panel solar dengan sewajarnya.Proses pelarasan dinamik ini memastikan bahawa panel solar sentiasa mengekalkan sudut optimum kepada matahari, dengan itu meningkatkan kecekapan pengumpulan tenaga panel solar.
Soalan Lazim [Soalan Lazim]
1. Bolehkah kelajuan kawalan L298N?
L298N adalah pemacu motor Bridge dua yang membolehkan kelajuan dan kawalan arah dua motor DC pada masa yang sama.
2. Mengapa L298N saya tidak berfungsi?
Ia mestilah melebihi 4.5V untuk operasi L298 yang betul.2. Anda akan kehilangan 2.5V di seluruh L298.Mungkin tidak ada voltan yang cukup untuk menjalankan motor.
3. Apakah L298N?
Pemandu motor L298N adalah pengawal yang menggunakan jambatan H untuk mudah mengawal arah motor dan PWM untuk mengawal kelajuan.Modul ini membolehkan anda menguruskan dua motor sehingga 2A setiap arah.Julat bekalan mungkin berbeza antara 5V dan 35V, cukup untuk kebanyakan projek motor DC.
4. Bolehkah kita menyambungkan 4 motor ke L298N?
Jawapannya adalah ya dan Tidak. Ia bergantung pada bagaimana anda menggunakan pemandu motor L298N.L298N pada asalnya direka untuk mengawal dua motor DC atau satu motor stepper.Tetapi, jika anda tidak mahu setiap motor berputar ke belakang, maka anda boleh menggunakan setiap sisi pemandu L298N untuk mengawal dua motor DC, dan sejumlah 4 motor.