Panduan untuk menggunakan PIC16F877A untuk projek motor stepper
Mikrokontroler PIC16F877A digunakan secara meluas dalam banyak projek elektronik kerana ia menawarkan keseimbangan ciri yang baik dan kemudahan penggunaan.Dalam panduan ini, kami akan melihat dengan jelas pada PIC16F877A, yang meliputi segala -galanya dari model pinout dan CAD untuk penggunaannya dalam mengawal motor stepper.Sama ada anda membina peranti mudah atau projek automasi yang kompleks, memahami cara menyambung dan mengawal motor menggunakan mikrokontroler ini akan membantu anda mendapatkan hasil yang terbaik.
Katalog

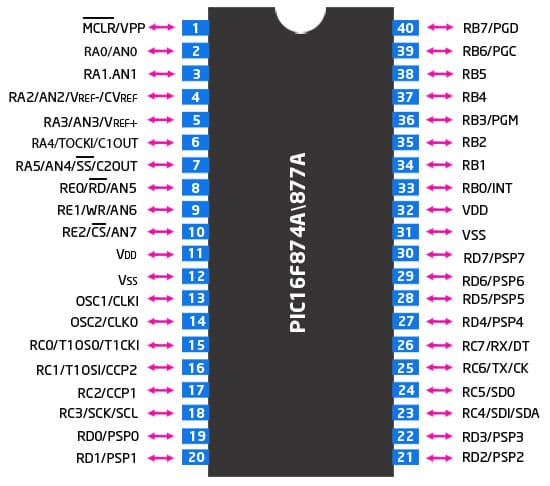
PIC16F877A Konfigurasi PIN
Model CAD untuk pic16f877a
Simbol Diagram PIC16F877A
PIC16F877A PCB Footprint

Model 3D
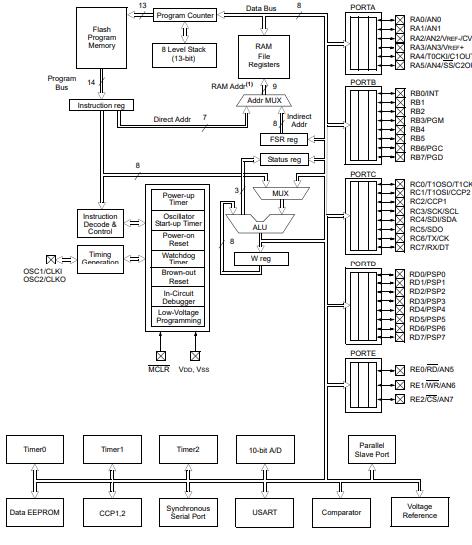
Struktur Dalaman PIC16F877A
Spesifikasi teknikal terperinci
| Jenis | Parameter |
| Masa memimpin kilang | 7 minggu |
| Gunung | Melalui lubang |
| Jenis pemasangan | Melalui lubang |
| Pakej / kes | 40-dip (0.600, 15.24mm) |
| Bilangan pin | 40 |
| Penukar data | A/D 8x10b |
| Bilangan I/OS | 33 |
| Pemasa pengawas | Ya |
| Suhu operasi | -40°C ~ 85°C ta |
| Pembungkusan | Tiub |
| Siri | Gambar® 16f |
| Diterbitkan | 1997 |
| Kod JESD-609 | e3 |
| Kod PBFree | Ya |
| Status bahagian | Aktif |
| Tahap Sensitiviti Kelembapan (MSL) | 1 (tidak terhad) |
| Bilangan penamatan | 40 |
| Kod ECCN | Telinga99 |
| Penamat terminal | Matte Tin (SN) - Annealed |
| Ciri tambahan | Beroperasi pada bekalan minimum 4V |
| Kedudukan terminal | Dwi |
| Voltan bekalan | 5v |
| Kekerapan | 20MHz |
| Nombor bahagian asas | PIC16F877A |
| Kiraan pin | 40 |
| Bekalan Voltan-Max (VSUP) | 5.5v |
| Bekalan kuasa | 5v |
| Bekalan Voltan-Min (VSUP) | 4.5v |
| Antara muka | I2C, SPI, SSP, UART, USART |
| Saiz memori | 14KB |
| Jenis pengayun | Luaran |
| Semasa bekalan nominal | 1.6mA |
| Saiz ram | 368 x 8 |
| Voltan - Bekalan (VCC/VDD) | 4V ~ 5.5V |
| UPS/UCS/jenis ICS periferal | Mikrokontroler, RISC |
| Pemproses teras | Gambar |
| Peripheral | Detect/Reset Brown-Out, POR, PWM, WDT |
| Jenis memori program | Kilat |
| Saiz teras | 8-bit |
| Saiz memori program | 14kb (8k x 14) |
| Sambungan | I2C, SPI, UART/USART |
| Saiz bit | 8 |
| Masa akses | 20 μs |
| Mempunyai ADC | Ya |
| Saluran DMA | Tidak |
| Lebar bas data | 8b |
| Bilangan pemasa/kaunter | 3 |
| Alamat lebar bas | 8b |
| Ketumpatan | 112 kb |
| Saiz eeprom | 256 x 8 |
| Keluarga CPU | Gambar |
| Bilangan saluran ADC | 8 |
| Bilangan saluran PWM | 2 |
| Bilangan saluran i2c | 1 |
| Ketinggian | 4.06mm |
| Panjang | 52.45mm |
| Lebar | 14.22mm |
| Mencapai svhc | Tiada SVHC |
| Pengerasan radiasi | Tidak |
| Status ROHS | Mematuhi ROHS3 |
| Memimpin percuma | Memimpin percuma |
Memahami motor stepper
Motor stepper adalah sejenis motor elektrik yang bergerak dalam langkah -langkah tertentu dan bukannya dalam gerakan berterusan seperti motor tradisional.Pergerakan langkah demi langkah ini diukur dalam darjah, yang boleh berbeza-beza bergantung kepada aplikasi.
Stepper Motors boleh beroperasi dalam mod yang berbeza: pemacu gelombang, pemacu penuh, dan setengah memandu.Setiap mod mengawal bagaimana fasa motor bertenaga, mempengaruhi prestasinya dan menjadikannya sesuai untuk pelbagai kegunaan.
Dalam mod pemacu gelombang, hanya satu fasa motor yang dikuasakan pada satu masa.Mod kawalan mudah ini berguna untuk situasi di mana kecekapan kuasa diprioritaskan melalui tork, seperti dalam tugas -tugas automasi asas di mana arus permulaan yang minimum diperlukan.
Mod pemacu penuh menguasai dua fasa secara serentak.Ini menghasilkan output tork yang lebih tinggi kerana dua gegelung berfungsi bersama -sama, menjadikannya sesuai untuk aplikasi di mana ketepatan dan kekuatan diperlukan, seperti dalam robotik dan jentera CNC.
Mod separuh pemacu menggabungkan ciri -ciri kedua -dua gelombang dan pemacu penuh dengan secara bergantian satu fasa dan dua fasa.Pendekatan ini memberikan saiz langkah yang lebih kecil, dengan berkesan menggandakan resolusi motor.Half Drive paling sesuai untuk aplikasi seperti percetakan 3D dan instrumentasi halus, di mana gerakan lancar dan kedudukan yang tepat adalah penting.
Apabila memilih motor stepper untuk kegunaan tertentu, pertimbangkan persekitaran operasi.Untuk tugas ketepatan tinggi, mod separuh pemacu disyorkan untuk memastikan peralihan yang lancar dan getaran yang dikurangkan.Untuk projek yang memberi tumpuan kepada penjimatan tenaga, mod pemacu gelombang mungkin lebih sesuai.
Memilih mod yang betul memerlukan faktor mengimbangi seperti tork, kelajuan, dan kerumitan sistem.Memilih mod yang betul boleh mempengaruhi prestasi motor dan kecekapan keseluruhan sistem anda.
Menyambungkan motor stepper dengan pic16f877a
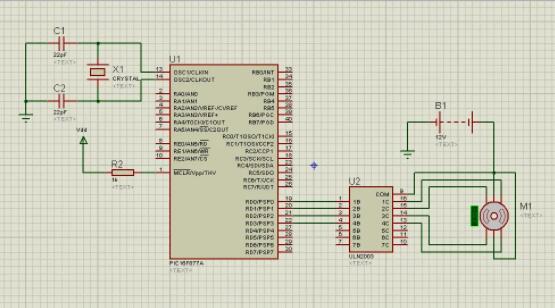
Untuk menyambungkan motor stepper dengan a PIC16F877A Mikrokontroler, anda boleh menggunakan array transistor ULN2003.Litar bersepadu ini, yang direka untuk motor tork tinggi, mengandungi tujuh pasangan Darlington.Bit port bawah mikrokontroler dikaitkan dengan pin input (1B, 2B, 3B, 4B) ULN2003, manakala pin outputnya (1C, 2C, 3C, 4C) menyambung ke pin stepper motor.Pin umum motor dan pin COM ULN2003 disambungkan ke bekalan kuasa 12V.
Motor stepper biasanya digunakan untuk aplikasi yang memerlukan kawalan gerakan yang tepat.Mereka menukar denyutan digital ke dalam putaran mekanikal, menjadikannya sesuai untuk peranti seperti mesin CNC dan pencetak 3D, di mana kedudukan dan kelajuan mesti dikawal dengan teliti.
ULN2003 memainkan peranan penting dalam mengawal motor stepper kerana keupayaannya untuk mengendalikan arus yang tinggi dan interfacing mudah dengan mikrokontroler.Apabila disambungkan ke PIC16F877A, bit portd yang lebih rendah digunakan untuk mengawal motor stepper.Konfigurasi ini menyediakan kawalan langkah yang tepat, memastikan pergerakan dan kedudukan yang tepat.
Menggunakan ULN2003 dalam persediaan kawalan motor sangat dipercayai dalam aplikasi dunia sebenar.Ia membantu meminimumkan isu -isu seperti langkah -langkah yang tidak dijawab atau kedudukan yang salah, meningkatkan prestasi keseluruhan.Penyelenggaraan dan penentukuran yang kerap berdasarkan data penggunaan dapat mengoptimumkan fungsi motor, memastikan kestabilan jangka panjang dan operasi yang tepat.
Menyesuaikan kelajuan motor stepper
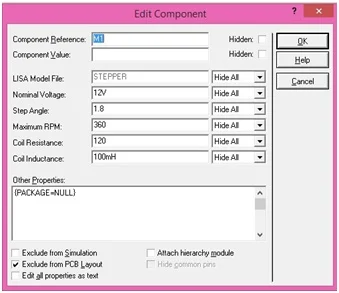
Kelajuan motor stepper boleh diubahsuai dengan tepat menggunakan perisian simulasi Proteus.Dengan mengakses tetapan motor melalui 'edit sifat,' pelarasan kepada parameter seperti bilangan langkah dan sudut langkah boleh dibuat.Sebagai contoh, motor 200 langkah memisahkan putaran penuh (360 °) ke dalam 200 langkah, menjadikan setiap langkah 1.8 °.Mengubah tetapan ini dalam Proteus akan mencerminkan secara dinamik semasa simulasi.
Dalam amalan, motor stepper sering digunakan dalam industri di mana kawalan pergerakan yang tepat adalah penting, seperti dalam jentera dan robotik CNC.Melaraskan sudut langkah dan bilangan langkah-langkah menyala motor untuk mencapai pergerakan tepat yang diperlukan untuk tugas-tugas tertentu.
Mengubah parameter motor stepper mempengaruhi ciri -ciri prestasi seperti tork dan resolusi.Sebagai contoh, meningkatkan bilangan langkah umumnya meningkatkan resolusi tetapi mungkin memberi kesan kepada tork dan masa tindak balas.Memahami perdagangan ini melalui simulasi membantu membuat keputusan yang tepat.
Perspektif yang bernuansa mendedahkan bahawa pelarasan berulang, diikuti dengan ujian praktikal, membawa kepada reka bentuk enjin yang lebih mantap.Memastikan bahawa simulasi digital rapat dengan mencerminkan hasil sebenar dunia adalah kritikal.Nuansa mengkonfigurasi motor stepper sememangnya terletak pada keseimbangan antara ketepatan teoritis dan kemungkinan praktikal.
Pengaturcaraan motor stepper dengan pic16f877a
Bahagian ini merangkumi cara memprogram motor stepper menggunakan mikrokontroler PIC16F877A, menerangkan mod memandu yang berbeza dan menyediakan panduan praktikal untuk pelaksanaan yang berkesan.
Berikut adalah kod contoh asas untuk menunjukkan kawalan motor stepper menggunakan mod pemacu penuh:
Kekosongan utama ()
{
TRISD = 0B00000000;// set portd sebagai output
Portd = 0b11111111;// Inisialisasi Portd
lakukan
{
Portd = 0b00000011;// bertenaga dua fasa secara serentak
Kelewatan_ms (500);// kelewatan 0.5 saat
Portd = 0b00000110;
Kelewatan_ms (500);
Portd = 0b00001100;
Kelewatan_ms (500);
Portd = 0b00001001;
Kelewatan_ms (500);
} sementara (1);// gelung selama -lamanya
}
Dalam kod ini, portd PIC16F877A dikonfigurasikan sebagai port output untuk mengawal motor stepper melalui pemandu ULN2003.Urutan arahan memberi tenaga dua fasa motor stepper pada satu masa, yang merupakan ciri mod pemacu penuh.Mod ini memegang pemutar dalam kedudukan tetap dengan tork maksimum tetapi biasanya menggunakan lebih banyak kuasa.
Mod pemacu penuh bukan satu -satunya cara untuk mengawal motor stepper.Pemacu gelombang dan setengah mod pemacu menyediakan alternatif berdasarkan keperluan tertentu.Pemandu gelombang hanya memberi satu fasa pada satu masa, yang mengurangkan penggunaan kuasa tetapi menghasilkan tork yang lebih rendah.Separuh pemacu bergantian antara satu dan dua fasa, menawarkan resolusi yang lebih tinggi dan pergerakan yang lebih lancar.
Apabila pengaturcaraan stepper motor, pilih mod memandu yang paling sesuai dengan keperluan anda, sama ada untuk kedudukan yang tepat, kecekapan kuasa, atau tork maksimum.
Aplikasi praktikal motor stepper
Stepper Motors digunakan secara meluas dalam banyak industri kerana keupayaan mereka untuk memberikan kawalan yang tepat dan prestasi yang boleh dipercayai.Kepelbagaian mereka menjadikan mereka sesuai untuk segala -galanya dari kereta dan peralatan rumah tangga ke mesin perindustrian dan peranti perubatan.
Di dunia automotif, Stepper Motors memainkan peranan penting dalam mengawal sistem seperti pendikit, lampu, dan penghawa dingin.Mereka membantu menyempurnakan komponen ini, memastikan kenderaan berjalan lancar dan cekap.Sementara itu, dalam peralatan pejabat seperti pencetak dan fotokopi, motor stepper mengendalikan tugas seperti pemakanan kertas dan penempatan dakwat.Ketepatan ini memastikan kualiti cetak yang konsisten dan operasi lancar dari masa ke masa.
Di rumah, peralatan seperti mesin basuh dan mesin basuh pinggan mangkuk bergantung kepada motor stepper untuk mengawal aliran air dan putaran dram, memastikan semuanya berfungsi dengan lancar.Dalam tetapan perindustrian, motor stepper adalah penting untuk mengendalikan mesin CNC dan lengan robot, di mana mereka menyediakan pergerakan yang tepat untuk pembuatan ketepatan tinggi.
Sistem keselamatan juga mendapat manfaat daripada gerakan motor stepper yang boleh dipercayai.Dalam peranti seperti kamera pengawasan dan kunci automatik, motor stepper membolehkan kedudukan yang lancar dan tepat, yang penting untuk pemantauan dan keselamatan yang berkesan.Dalam penjagaan kesihatan, motor stepper digunakan dalam peranti perubatan seperti pam infusi dan peralatan pengimejan, di mana mereka menawarkan kawalan yang tepat untuk operasi yang selamat dan tepat.
Memandangkan teknologi terus berkembang, Stepper Motors dijangka dapat mencari lebih banyak aplikasi dalam bidang baru seperti robotik dan kenderaan autonomi.Pembangunan berterusan mereka mungkin akan membawa kepada ketepatan dan kecekapan yang lebih besar, memperluaskan peranan mereka dalam pelbagai industri.
Bahagian mikrokontroler yang setanding
| Nombor bahagian | PIC16F877A-I/P. | PIC16F77-I/P. | PIC16F74-I/P. | PIC16F777-I/P. |
| Pengilang | Teknologi Microchip | Teknologi Microchip | Teknologi Microchip | Teknologi Microchip |
| Pakej / kes | 40-dip (0.600, 15.24mm) | 40-dip (0.600, 15.24mm) | 40-dip (0.600, 15.24mm) | 40-dip (0.600, 15.24mm) |
| Bilangan pin | 40 | 40 | 40 | 40 |
| Lebar bas data | 8 b | 8 b | 8 b | 8 b |
| Bilangan I/O. | 33 | 33 | 33 | 36 |
| Antara muka | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| Saiz memori | 14 kb | 7 kb | 14 kb | 14 kb |
| Voltan bekalan | 5 v | 5 v | 5 v | 5 v |
| Peripheral | Detect/Reset Brown-Out, POR, PWM, WDT | Detect/Reset Brown-Out, POR, PWM, WDT | Detect/Reset Brown-Out, POR, PWM, WDT | Detect/Reset Brown-Out, POR, PWM, WDT |
| Lihat Bandingkan | PIC16F877A-I/P. Vs PIC16F77-I/P. | PIC16F877A-I/P. Vs PIC16F77-I/P. | PIC16F877A-I/P. Vs PIC16F74-I/P. | PIC16F877A-I/P. Vs PIC16F777-I/P. |
Soalan Lazim [Soalan Lazim]
1. Apa yang digunakan oleh motor stepper untuk menjana pergerakan mekanikal?
Motor stepper menjana pergerakan mekanikal menggunakan denyutan elektrik.
2. Apa yang dilakukan oleh motor stepper?
Motor stepper bergerak dalam langkah -langkah diskret.
3. Bagaimana motor stepper diukur?
Motor stepper diukur dalam darjah.
4. Berapa banyak langkah yang diambil oleh motor stepper?
Motor stepper bergerak satu langkah pada satu masa.
5. Berapa banyak mod pengujaan yang mempunyai motor stepper?
Motor stepper mempunyai tiga mod pengujaan.
6. Apakah cara paling mudah untuk menyambungkan motor stepper?
Cara paling mudah adalah menyambungkannya ke mikrokontroler PIC16F877A.
7. Berapa banyak pin input ULN2003 yang disambungkan ke bit penting paling rendah dari port mikropengawal?
Empat pin input disambungkan ke bit penting paling rendah dari portd mikrokontroler
Tentang kita
ALLELCO LIMITED
Baca lebih lanjut
Siasatan Pantas.
Sila hantar pertanyaan, kami akan bertindak balas dengan segera.
Mengapa memilih cip memori Adesto RM25C64DS-LTAI-B untuk projek anda?
pada 2024/10/10
PC817 Optocoupler: Fungsi dan Aplikasi Moden
pada 2024/10/10
Jawatan popular
-
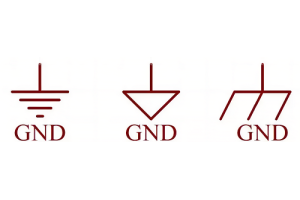
Apakah GND dalam litar?
pada 1970/01/1 2838
-

Panduan Penyambung RJ-45: Kod Warna Penyambung RJ-45, Skim Pendawaian, Aplikasi R-J45, RJ-45 Datasheets
pada 1970/01/1 2409
-

Jenis Penyambung Serat: SC vs LC dan LC vs MTP
pada 1970/01/1 2019
-
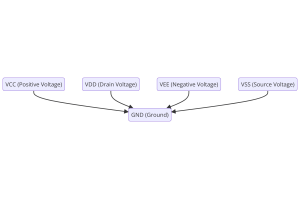
Memahami Voltan Bekalan Kuasa dalam Elektronik VCC, VDD, VEE, VSS, dan GND
pada 0400/11/5 1766
-

Perbandingan antara DB9 dan Rs232
pada 1970/01/1 1726
-

Apakah bateri LR44?
Elektrik, kekuatan di mana-mana, secara senyap-senyap meresap setiap aspek kehidupan seharian kita, dari alat remeh ke peralatan perubatan yang mengancam nyawa, ia memainkan peranan senyap.Walau bagaimanapun, benar -benar menggenggam tenaga ini, terutamanya bagaimana untuk menyimpan dan mengeluarkannya dengan cekap, bukan tugas yang mudah.Ia bertentangan dengan latar belakang ini bahawa artikel in...pada 1970/01/1 1679
-
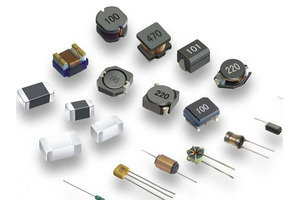
Memahami asas -asas: rintangan induktansi, dancapacitance
Dalam tarian kejuruteraan elektrik yang rumit, trio unsur -unsur asas mengambil peringkat tengah: induktansi, rintangan, dan kapasitans.Setiap menanggung ciri -ciri unik yang menentukan irama dinamik litar elektronik.Di sini, kami memulakan perjalanan untuk menguraikan kerumitan komponen -komponen ini, untuk mendedahkan peranan dan kegunaan praktikal mereka dalam orkestra elektrik yang luas.Indukt...pada 1970/01/1 1621
-

Panduan Komprehensif Bateri CR2430: Spesifikasi, Aplikasi dan Perbandingan dengan Bateri CR2032
Apakah bateri CR2430?Faedah bateri CR2430NormaAplikasi bateri CR2430CR2430 setaraCR2430 VS CR2032Bateri CR2430 SaizApa yang perlu dicari semasa membeli CR2430 dan setaraLembaran data PDFSoalan yang sering ditanya Bateri adalah jantung peranti elektronik kecil.Di antara banyak jenis yang ada, sel -sel duit syiling memainkan peranan penting, yang biasa dijumpai dalam kalkulator, kawalan jauh, dan ja...pada 1970/01/1 1495
-

CR2450 VS CR2032: Bolehkah bateri digunakan?
Bateri mangan lithium mempunyai beberapa persamaan dengan bateri litium lain.Ketumpatan tenaga yang tinggi dan hayat perkhidmatan yang panjang adalah ciri -ciri yang mereka ada bersama.Bateri semacam ini telah memenangi kepercayaan dan memihak kepada ramai pengguna kerana keselamatannya yang unik.Alat teknologi mahal?Peralatan kecil di rumah kita?Lihatlah dan anda akan melihatnya di mana -mana.Di ...pada 1970/01/1 1471
-
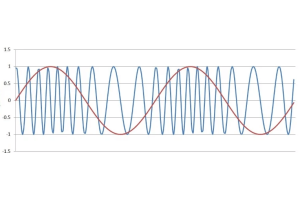
Apa itu RF dan mengapa kita menggunakannya?
Teknologi frekuensi radio (RF) merupakan bahagian utama komunikasi tanpa wayar moden, yang membolehkan penghantaran data dalam jarak jauh tanpa sambungan fizikal.Artikel ini menyelidiki asas -asas RF, menjelaskan bagaimana radiasi elektromagnet (EMR) menjadikan komunikasi RF mungkin.Kami akan meneroka prinsip-prinsip EMR, penciptaan dan kawalan isyarat RF, dan kegunaan luas mereka.Artikel ini juga...pada 1970/01/1 1454
Nombor bahagian panas
-

SN54ALS245AJ
Texas Instruments
OCTAL BUS TRANSCEIVERS WITH 3-ST
MC1648M
Motorola
MC1648M
TW2964-LA2-CR128
Renesas Electronics America Inc
IC AUDIO CODEC/VID DECOD 128LQFP
CS5205-2GDPR3
onsemi
IC REG LINEAR 1.5V 5A D2PAK-3
BAT54W
Diotec Semiconductor
DIODE SCHOTTKY 30V 200MA SOT323
MPQ7091
onsemi
POWER BIPOLAR TRANSISTOR, PNP
0603L150SLYR
Littelfuse Inc.
PTC RESET FUSE 6V 1.5A 0603
VT357FCR-ADJ
Analog Devices Inc./Maxim Integrated
INTEGRATED CIRCUIT
BTS5020-1EKA
Infineon Technologies
BTS5020 - PROFET - SMART HIGH SI
AT27C516-70JC
Microchip Technology
IC EPROM 512KBIT PARALLEL 44PLCC
CS2100CP-DZZR
Cirrus Logic Inc.
IC FRACT N SYNTH 10MSOP
MSCD165-16
Microsemi Corporation
DIODE MODULE 1.6KV 165A SD2
MCR106-8G
Littelfuse Inc.
SCR 600V 4A TO225AA
08055C103ZAT4T
KYOCERA AVX
CAP CER 10000PF 50V X7R 0805
FDMS7558S
Fairchild Semiconductor
MOSFET N-CH 25V 32A/49A 8PQFN
SCM1246MF
Sanken
IC BRIDGE DRIVER PAR SCM33
MKL17Z256VFM4
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 32QFN
XC7S50-1CSGA324Q
AMD
IC FPGA 324CSGA -
TP3094V
Texas Instruments
IC INTERFC PCM COMBO QUAD 44PLCC
MT48LC4M32B2B5-6A XIT:L
Micron Technology Inc.
IC DRAM 128MBIT PAR 90VFBGA
5007620481
Molex
CONN HEADER BRD EDGE 48POS
MB6S-TP
Micro Commercial Co
BRIDGE RECT 1P 600V 500MA MBS-1
GRM188C81C225KA12D
Murata Electronics
CAP CER 2.2UF 16V X6S 0603
MAX732EWE
Analog Devices Inc./Maxim Integrated
IC REG BOOST 12V 200MA 16SOIC
FH36W-17S-0.3SHW(99)
Hirose Electric Co Ltd
CONN FPC BOTTOM 17POS 0.3MM R/A
SSB44-E3/52T
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 40V 4A DO214AA
VE-26L-MV
Vicor Corporation
DC DC CONVERTER 28V 150W
VNQ830E13TR
STMicroelectronics
IC PWR DRIVER N-CHANNEL 1:1 28SO
S-812C24AMC-C2ET2G
ABLIC Inc.
IC REG LINEAR 2.4V 30MA SOT23-5
LP38691SD-5.0
Texas Instruments
IC REG LINEAR 5V 500MA 6WSON
LT1460HCS3-5#TRMPBF
Analog Devices Inc.
IC VREF SERIES 0.2% SOT23-3
TSS521DR
Texas Instruments
IC TRANSCEIVER HALF 1/1 16SOIC
DMC3035LSD-13
Diodes Incorporated
MOSFET N/P-CH 30V 6.9A/5A 8-SOIC
1N1199B
Solid State Inc.
DIODE GEN PURP 50V 12A DO4
MCP9801T-M/SN
Microchip Technology
SENSOR DIGITAL -55C-125C 8SOIC
SI4646DY-T1-E3
Vishay Siliconix
MOSFET N-CH 30V 12A 8SO -

AONS66923
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 100V 15A/47A 8DFN
SI4459ADY-T1-GE3
Vishay Siliconix
MOSFET P-CH 30V 29A 8SO
STM32F103VBT6
STMicroelectronics
IC MCU 32BIT 128KB FLASH 100LQFP
LTC2991CMS#PBF
ADI (Analog Devices, Inc.)
IC MONITOR OCTAL 16-MSOP
18081C223KAT2A
KYOCERA AVX
CAP CER 0.022UF 100V X7R 1808
GRM1886P1H750JZ01D
Murata Electronics
CAP CER 75PF 50V P2H 0603
MAX667CPA
Analog Devices Inc./Maxim Integrated
IC REG LIN POS ADJ 250MA 8DIP
FGA20S120M
onsemi
IGBT 1200V 40A 348W TO3PN
ACS108-5SA
STMicroelectronics
TRIAC SENS GATE 500V 0.8A TO92-3
NP1300SAT3G
onsemi
THYRISTOR 120V 50A DO214AA
PIC18LF2525-I/SO
Microchip Technology
IC MCU 8BIT 48KB FLASH 28SOIC
MAX4528CSA+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 2 110OHM 8SOIC
74HC125PW,118
Nexperia USA Inc.
IC BUFFER NON-INVERT 6V 14TSSOP
VI-27T-IW
Vicor Corporation
DC DC CONVERTER 6.5V 100W
IS62WV6416BLL-55BLI
ISSI, Integrated Silicon Solution Inc
IC SRAM 1MBIT PARALLEL 48TFBGA
PE-65762T
Pulse Electronics
IC CHIP
PSMN017-60YS,115
Nexperia USA Inc.
MOSFET N-CH 60V 44A LFPAK56
12103C823KAT2A
KYOCERA AVX
CAP CER 0.082UF 25V X7R 1210